
TME303/03 Automation & Robotics Assignment 2, WOU, Malaysia
Assignment Type
Individual Assignment
Subject
TME303: Automation and robotics Assignment
Uploaded by Malaysia Assignment Help
Date
03/11/2024
Question 1 [30%]
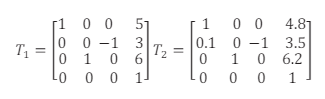
The initial location and orientation of a robot’s hand are given by �”, and its new location and orientation after a change are given by �#.
a) Construct a transformation matrix Q that will accomplish this transform (in the Universe frame).
b) Assuming the change is small, determine a differential operator that will do
the same.
c) By inspection, solve the differential translation and a differential rotation that constitute this operator
Question 2
Figure 1(a) and (b) shows a robotic arm used in automotive industry for painting and welding application. Based on the figures:
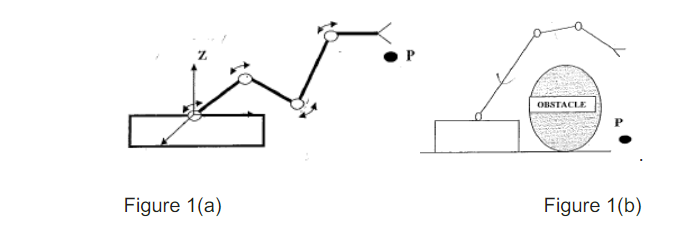
a) State number axes rotation
b) Degree of Freedom (DOF) in world space
c) Sketch any three (3) ways by which the robot can reach point P
Stuck in This Assignment? Deadlines Are Near?
Instruction: Student needs to work in individual for Part 1 and Part 2.
The laboratory practicals are separated into two lab sessions with week
#1 of 4 hours and week #2 of 6 hours. The practical sections are to be
conducted with the virtual robot using the EPSON Robot simulator
(cylindrical robot model: G6–551S).
Objective
The objectives of this laboratory are:
1. To learn about the different components of the robot and gain hands–on experience on the robotic arm.
2. To demonstrate programming features on the robot.
3. Plan a set of robot paths for picking and placing an object by avoiding obstacles along the way. In the current lab set–up, you are expected to create the obstacles as well as the initial and target points.
Get 30% Discount on This Assignment Answer Today!
Get Help By Expert
Seeking help for TME303 Automation and Robotics assignments task? Discover our reliable online assignment helper for all Malaysian students, along with specialized dissertation help Malaysia. Achieve excellence in Automation and Robotics studies with our tailored assistance.
Recommended Assignments for You
Related University Assignments
- TEE314 Microelectronics Course Assignment 2 Brief 2026 | WOU
- MPU3193 /MCMPU3193 Philosophy and Current Issues Assignment 2, 2026
- MCBMG311/03 Micro – Credential in Employment Law and Industrial Relations Assessment 3 Question 2026 | WOU
- TEE208/03 Circuit Theory II Assignment 2, 2026 | Wawasan Open University
- TEL 203/03 Process Control and Instrumentation Course Assessment 2 (CA2 – 30%)
- The Challenges Teaching English to Refugee Children Research Proposal Case Study
- TEE106/03 Basic Electromagnetic Theory Assignment 1 (25%)
- WUC118/03 Computing & Digital Transformation Assignment: Case-Based Analysis on Cloud, Cybersecurity & Emerging Technologies
- BMG 323/03 (BBM023/03) Clustering and Predictive Analysis Assignment 2: Homestay Case Study for Data-Driven Business Optimization in Malaysia
- BBM205 MCBBM205 Course Assignment(25%) January 2025 WAWASAN Open University : Basic Accounting

Convincing Features

