
EMM3563 Control Engineering Assignment Questions 2026 | UPNM
Assignment Type
Individual Assignment
Subject
EMM3563 Control Engineering
Uploaded by Malaysia Assignment Help
Date
05/27/2026
EMM3563 Assignment Questions
Course Outcome
| CO1
PO1 |
Describe the basic principles and main components of control system |
| CO2
PO2 |
Build the mathematical model,block diagram, signal flow graph and its equivalence transfer function for a given control system |
| CO3
PO2 |
Analyze the time responses and the stability of control system |
| CO5
PO5 |
Design a simple control system according to the required specifications |
| TOTAL (10%) |
Instructions:
Answer All Questions
In this project, you will be developing a torque controller for a rotating rod with an attached mass as shown below. The system has an internal viscous friction at pivot O that gives system damping with coefficient b. Consider a clockwise input torque of magnitude Ω supplied to the rod pivot O.
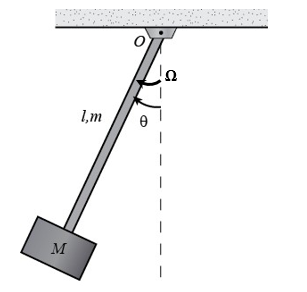
1. Determine what kind of sensor should be placed on the pivot to measure the input and output variables. Justify your answer.
[CO1 PO1]
2. What kind of actuator usually used to generate the required input torque?
[CO1 PO1]
3. Develop a block diagram for the system in MATLAB/Simulink.
[CO2 PO2]
4. Consider an impulse torque input with magnitude 5 Nm as shown below. You can generate this signal using signal builder block in Simulink.
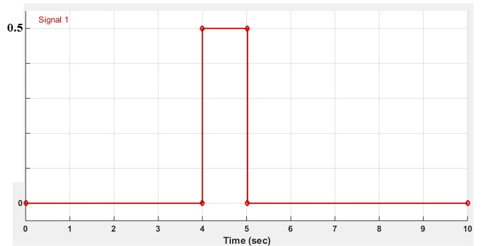
Simulate the system in MATLAB/Simulink environment with the torque input. Note the Maximum Overshoot magnitude, rise time, peak time, settling time, steady state value, and steady state error (if exist).
[CO5 PO5]
5. Considering an impulse input Ω and small angle θ assumption, derive the linear time response equation. Plot graph from this equation and compare with response from (4). Comment on validity of your derived equation.
[CO3 PO2]
6. Design a PID controller for a position tracking control to ensure that the rod angle will achieve θ Include a new block diagram for your control system. Discuss your PID parameters and controller performance.
[CO5 PO5]
System Parameters are depending on your student Number
- = 1; % length of the pendulum rod (m)
- = (matrik(3)*100 + matrik(6)*10)/1000; % mass of the pendulum bob (kg) m = (matrik(2)*100 + matrik(7))/1000; % mass of the pendulum rod (kg) b = (matrik(6) + matrik(7))/20; % viscous friction coefficient (N-m-s)
Theta = matrik(6)*10 + matrik(7); % Magnitude of angle for PID to track (deg)
EMM3563 Assignment Rubrics
| CO | Criteria | Weightage (%) | Evaluation Scale | Max. Score | ||
| Below Expectation | Between Acceptable to Outstanding | Outstanding | ||||
| CO1 PO1 |
|
1.6667 | 1 | 2 | 3 | 5 |
| CO1 PO1 |
|
1.667 | 1 | 2 | 3 | 5 |
| CO2 PO2 |
|
5 | 1 | 2 | 3 | 10 |
| CO5 PO5 |
|
5 | 1 | 2 | 3 | 25 |
| CO3 PO2 |
|
10 | 1 | 2 | 3 | 30 |
| CO5 PO5 |
|
10 | 1 | 2 | 3 | 25 |
| Penalty for late submission (-10% of total marks for each day, starting 4th Jan 2019 1400H) |
||||||
| Penalty for plagiarism Plagiarised work(s) will be awarded zero marks | ||||||
| Total | 100 | |||||
Academic Support for EMM3563 Control Engineering Assignment Questions
Get Help By Expert
Do you also need our control engineering assignment help for this EMM3563 Control Engineering assignment? Then this is common, because many engineering students face issues while working on MATLAB/Simulink modeling, PID controller design, transfer function derivation, and time response analysis. And like many other students, you can also get a custom-written academic solution for your assignment through Malaysia Assignment Help. For trust, you can explore our engineering assignment samples to see the quality of work we provide, and for better understanding you can also check related UPNM assignments examples. So, order today for professional coursework helper support.
Recommended Assignments for You
Related University Assignments
- EMM3563 Control Engineering Assignment Questions 2026 | UPNM
- MBA7173 Research Methodology Assignment 3 Concept Paper | UPNM
- MBA7173 Research Methodology Assignment 1 Research Matrix | UPNM
- EEE3473: Design a 4-bit BCD adder that will add two BCD numbers and produce the sum in BCD format. If the sum of two numbers: Digital System Assignment, UPNM, Malaysia
- You are required to program 2 out of 3, of these TASKS; calculate the circumference of a cuboid: Microprocessors & Microcomputer Assignment, UPNM, Malaysia

Convincing Features

